Observing Capabilities¶
This section summarizes the projected observing capabilities of the global gravitational-wave detector network, superseding the Living Review [1] on prospects for observing and localizing gravitational-wave transients with Advanced LIGO, Advanced Virgo, and KAGRA.
Timeline¶
Note
Check the LIGO, Virgo, and KAGRA Observing Run Plans for the latest details on scheduling of the next observing run, which are summarized here.
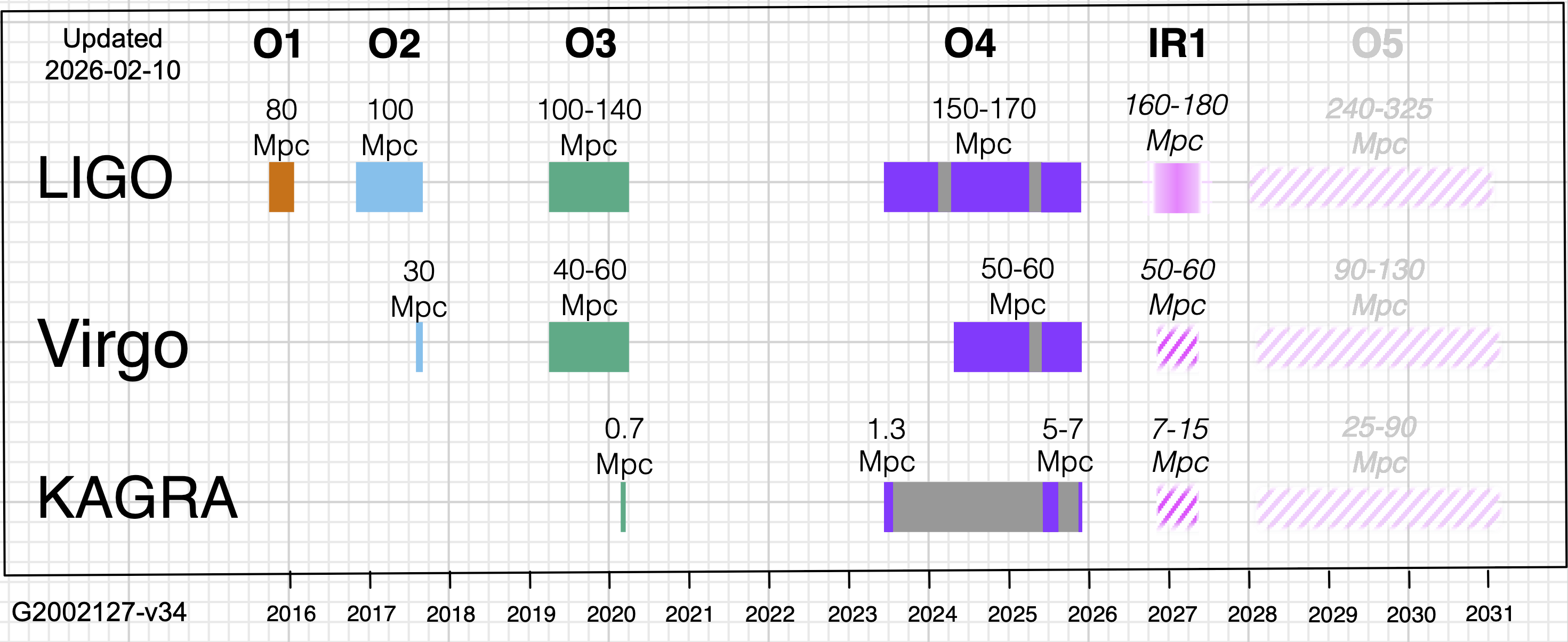
The gravitational-wave observing schedule is divided into Observing Runs or epochs of months to years of operation at fixed sensitivity, down time for construction and commissioning, and transitional Engineering Runs or between commissioning and observing runs. The long-term observing schedule is shown below. Downtime for upgrades and commissioning are depicted by vertical gray bands.
Since BNS mergers are a well-studied class of gravitational-wave signals, this figure gives the BNS range for a single-detector SNR threshold of 8 in each observing run.
As of this writing (July 2026), LIGO, Virgo, KAGRA are in commissioning and brief periods of data collection are possible. We may send alerts for exceptional events during periods of good data quality.
There will be an interim six-month observing run, designated IR1, starting between late October and mid November 2026. Both LIGO detectors will be observing; Virgo will join but may go offline at times for maintenance and upgrades; KAGRA will join if able to.
Observing Run 5 (O5), currently conceived of as spanning 2029-2031, is still in an early planning stage.
Live Status¶
There are a handful of public web pages that report live status of the LIGO/Virgo/KAGRA detectors and alert infrastructure.
- Detector Status Portal: Daily summary of detector performance.
- GWIStat: Real-time detector up/down status and estimated range.
Public Alert Rate and Localization Accuracy¶
Here we provide predicted public alert rates, distances, and localization uncertainties for BNS, NSBH, and BBH mergers in O4 and O5, based on a Monte Carlo simulation of detection and localization of events.
The predicted rate of BNS alerts has decreased significantly compared to previous versions of this document due to downward revision of the BNS merger rate density estimated from analysis of O4 [2].
The O4 simulation results are included to demonstrate approximate agreement with past alerts. For O5, we include three scenarios representing a range of plausible sensitivities: O5a, O5b, and O5c.
The methodology and results of the simulation are described in [1], [3], and [4].
Source code to reproduce these simulations is available at https://github.com/lpsinger/observing-scenarios-simulations/tree/v4 or doi:10.5281/zenodo.18224889.
Sky localization FITS files from these simulations are provided at doi:10.5281/zenodo.18223624.
Detection Threshold¶
The network SNR threshold for detection was set to 8 in order to approximately reproduce the rate of public alerts that were sent in O3 and O4 (see [3]).
Important
This section predicts the rate of public alerts, not the rate of highly confident detections. Most public alerts do not survive as confident detections in the authoritative LIGO/Virgo/KAGRA compact binary catalogs.
Detector Network¶
The detector sensitivities during IR1 will probably be similar to that of O4, but it is not yet clear how much of the run Virgo will be operating. Accordingly, below we have provided O4 simulations for both a Hanford-Livingston (HL) and a Hanford-Livingston-Virgo (HLV) network.
For O5, we include three scenarios representing a range of plausible sensitivities: O5a, O5b, and O5c.
The detector amplitude spectral density (Hz\(^{-1/2}\)) curves used for O4 are available in LIGO-T2500363-v1 and LIGO-T2500388-v1. The curves for O5 are available in LIGO-T2500310-v2 and VIR-0797A-25.
We assume that each detector has an independent observing duty cycle of 70%.
Source Distribution¶
We draw masses and spins of compact objects from the global fit to 158 mergers in the Gravitational-Wave Transient Catalog (GWTC) 4.0 [2]. The distribution is described below.
Masses
The joint 2D distribution of the primary mass \(m_1\) and the secondary mass \(m_2\) is the Binned Gaussian Process (BGP) model from [2], available as a data file in doi:10.5281/zenodo.16911563, and shown in the figure below.

Binned Gaussian Process (BGP) model for the joint distribution of \(m_1\) and \(m_2\).¶
Spins
The spins of the binary component objects are isotropically oriented. Component objects with masses less than 2.5 \(M_\odot\) have spin magnitudes that are uniformly distributed from 0 to 0.4, and components with greater masses have spin magnitudes that are uniformly distributed from 0 to 1.
Sky Location, orientation
Sources are isotropically distributed on the sky and have isotropically oriented orbital planes.
Redshift
Sources are uniformly distributed in differential comoving volume per unit proper time.
Rate
The total rate density of mergers, integrated across all masses and spins, is set to \(110_{-60}^{+130}\,\mathrm{Gpc}^{-3}\mathrm{yr}^{-1}\) ([2], Table 2, second row, last column).
Summary Statistics¶
The table below summarizes the estimated public alert rate and sky localization accuracy in O4 and O5. All values are given as a 5% to 95% confidence intervals.
Observing run |
Network |
Source class |
||
|---|---|---|---|---|
Merger rate per unit comoving volume per unit proper time
(Gpc-3 year-1,
log-normal uncertainty)
|
||||
\(45 ^{+53} _{-24}\) |
\(25 ^{+29} _{-14}\) |
\(40 ^{+48} _{-22}\) |
||
Sensitive volume: detection rate / merger rate
(Gpc3, Monte Carlo uncertainty)
|
||||
O4 |
HL |
\(0.049 ^{+0.016} _{-0.013}\) |
\(0.152 ^{+0.037} _{-0.031}\) |
\(5.10 ^{+0.16} _{-0.15}\) |
O4 |
HLV |
\(0.061 ^{+0.017} _{-0.015}\) |
\(0.203 ^{+0.043} _{-0.037}\) |
\(6.04 ^{+0.17} _{-0.17}\) |
O5a |
HLV |
\(0.129 ^{+0.028} _{-0.025}\) |
\(0.484 ^{+0.072} _{-0.065}\) |
\(12.90 ^{+0.28} _{-0.27}\) |
O5b |
HLV |
\(0.236 ^{+0.040} _{-0.036}\) |
\(0.867 ^{+0.103} _{-0.095}\) |
\(18.77 ^{+0.36} _{-0.35}\) |
O5c |
HLV |
\(0.340 ^{+0.049} _{-0.044}\) |
\(1.04 ^{+0.11} _{-0.11}\) |
\(22.04 ^{+0.40} _{-0.39}\) |
Annual number of public alerts
(log-normal merger rate uncertainty \(\times\) Poisson
counting uncertainty)
|
||||
O4 |
HL |
\(1 ^{+4} _{-1}\) |
\(3 ^{+7} _{-3}\) |
\(210 ^{+250} _{-120}\) |
O4 |
HLV |
\(2 ^{+4} _{-2}\) |
\(4 ^{+9} _{-4}\) |
\(240 ^{+290} _{-140}\) |
O5a |
HLV |
\(5 ^{+9} _{-5}\) |
\(11 ^{+17} _{-8}\) |
\(520 ^{+620} _{-290}\) |
O5b |
HLV |
\(10 ^{+15} _{-8}\) |
\(21 ^{+28} _{-14}\) |
\(760 ^{+910} _{-420}\) |
O5c |
HLV |
\(15 ^{+20} _{-11}\) |
\(25 ^{+33} _{-16}\) |
\(890 ^{+1060} _{-490}\) |
Median luminosity distance
(Mpc, Monte Carlo uncertainty)
|
||||
O4 |
HL |
\(225 ^{+61} _{-38}\) |
\(424 ^{+48} _{-32}\) |
\(1835 ^{+46} _{-45}\) |
O4 |
HLV |
\(266 ^{+33} _{-44}\) |
\(471 ^{+49} _{-55}\) |
\(1987 ^{+37} _{-42}\) |
O5a |
HLV |
\(375 ^{+40} _{-52}\) |
\(589 ^{+45} _{-44}\) |
\(2595 ^{+43} _{-41}\) |
O5b |
HLV |
\(438 ^{+17} _{-45}\) |
\(757 ^{+53} _{-64}\) |
\(3052 ^{+44} _{-39}\) |
O5c |
HLV |
\(473 ^{+27} _{-37}\) |
\(808 ^{+58} _{-54}\) |
\(3241 ^{+39} _{-43}\) |
Median 90% credible area
(deg2, Monte Carlo uncertainty)
|
||||
O4 |
HL |
\(1900 ^{+520} _{-470}\) |
\(1860 ^{+520} _{-340}\) |
\(2277 ^{+61} _{-58}\) |
O4 |
HLV |
\(1420 ^{+310} _{-250}\) |
\(2150 ^{+380} _{-310}\) |
\(1837 ^{+55} _{-48}\) |
O5a |
HLV |
\(1260 ^{+130} _{-280}\) |
\(1540 ^{+140} _{-400}\) |
\(1238 ^{+27} _{-31}\) |
O5b |
HLV |
\(1350 ^{+240} _{-240}\) |
\(1710 ^{+170} _{-120}\) |
\(1472 ^{+31} _{-32}\) |
O5c |
HLV |
\(1150 ^{+240} _{-170}\) |
\(1320 ^{+130} _{-190}\) |
\(1155 ^{+29} _{-25}\) |
Median 90% credible comoving volume
(103 Mpc3,
Monte Carlo uncertainty)
|
||||
O4 |
HL |
\(28 ^{+11} _{-14}\) |
\(69 ^{+30} _{-17}\) |
\(2560 ^{+150} _{-150}\) |
O4 |
HLV |
\(22.5 ^{+9.8} _{-9.4}\) |
\(117 ^{+47} _{-28}\) |
\(2550 ^{+140} _{-150}\) |
O5a |
HLV |
\(36 ^{+18} _{-13}\) |
\(139 ^{+62} _{-49}\) |
\(2750 ^{+140} _{-130}\) |
O5b |
HLV |
\(57 ^{+28} _{-18}\) |
\(346 ^{+32} _{-67}\) |
\(5000 ^{+180} _{-180}\) |
O5c |
HLV |
\(71 ^{+21} _{-17}\) |
\(247 ^{+84} _{-29}\) |
\(4100 ^{+160} _{-140}\) |
Merger rate per unit comoving volume per unit proper time is the astrophysical rate of mergers in the reference frame that is comoving with the Hubble flow. It is averaged over a distribution of masses and spins that is assumed to be non-evolving.
Caution
The merger rate per comoving volume should not be confused with the binary formation rate, due to the time delay between formation and merger.
It should also not be confused with the merger rate per unit comoving volume per unit observer time. If the number density per unit comoving volume is \(n = dN / dV_C\), and the merger rate per unit proper time \(\tau\) is \(R = dn/d\tau\), then the merger rate per unit observer time is \(R / (1 + z)\), with the factor of \(1 + z\) accounting for time dilation.
See [5] for further discussion of cosmological distance measures as they relate to sensitivity figures of merit for gravitational-wave detectors.
Sensitive volume is the quotient of the rate of detected events per unit observer time and the merger rate per unit comoving volume per unit proper time. The definition is given in the glossary entry for sensitive volume. To calculate the detection rate, multiply the merger rate by the sensitive volume.
The quoted confidence interval represents the uncertainty from the Monte Carlo simulation.
Annual number of public alerts is the number of alerts in one calendar year of observation. The quoted confidence interval incorporates both the log-normal distribution of the merger rate and Poisson counting statistics, but does not include the Monte Carlo error (which is negligible compared to the first two sources of uncertainty).
The remaining sections all give median values over the population of detectable events.
Median luminosity distance is the median luminosity distance in Mpc of detectable events. The quoted confidence interval represents the uncertainty from the Monte Carlo simulation.
Note
Although the luminosity distances for BNSs in the table above are about twice as large as the BNS ranges in the figure in the Timeline section, the median luminosity distances should be better predictors of the typical distances of events that will be detectable during the corresponding observing runs.
The reason is that the BNS range is a characteristic distance for a single GW detector, not a network of detectors. LIGO, Virgo, and KAGRA as a network are sensitive to a greater fraction of the sky and a greater fraction of binary orientations than any single detector alone.
Median 90% credible area is the area in deg\(^2\) of the smallest (not necessarily simply connected) region on the sky that has a 90% chance of containing the true location of the source.
Median 90% credible volume is the median comoving volume enclosed in the smallest region of space that has a 90% chance of containing the true location of the source.
Cumulative Histograms¶
Below are cumulative histograms of the 90% credible area, 90% credible comoving volume, and luminosity distance of detectable events in O3, O4, and O5.

Cumulative annual public alert rate of simulated mergers as a function of 90% credible area (left column), 90% credible comoving volume (middle column), or luminosity distance (right column). Rates are given for three sub-populations: BNS (top row), NSBH (middle row), and BBH (bottom row). The shaded bands give the inner 90% confidence interval including uncertainty in the estimated merger rate, Monte Carlo uncertainty from the finite sample size of the simulation, and Poisson fluctuations in the number of sources detected in one year.¶